今日はサーボモータを使った実験をします。
サーボモーターに角度をプログラムすることで動くのでこれとても便利です。
アウトプットの表現として色々使えそうです。
【使用しているテキスト】
 |
|
新品価格 |
- 必要部材
- Aruduino本体 または互換機(安価)
- Arduino互換機
※IDEで下記設定変更をすると使えます。
詳しくはhttp://u-style.info/2020/08/14/arduino演習記録01-ide環境を作る統合開発環境の構築)/
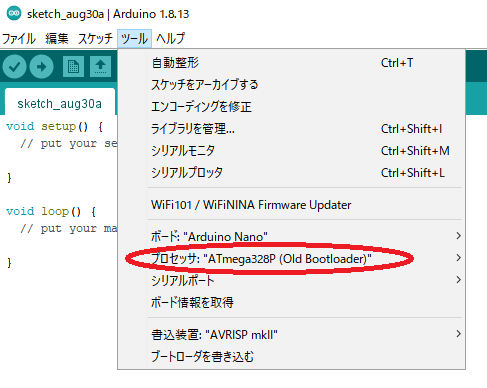
- ボード ArduinoNano
- プロセッサATmega328P(OldBootloder)
※IDE使用時はこの変更が大事! - シリアルポートCOM5 ※任意:環境に応じて変更

新品価格
¥2,280から
(2020/8/15 10:52時点)※(3個入りでUSBコード、ブレッドボード、配線付き)

- Arduino Uno

Arduino Uno Rev3 ATmega328 マイコンボード A000066
新品価格
¥2,500から
(2020/8/15 10:49時点)
- ブレットボード

HiLetgo・ 5個セット 400穴 ミニブレッドボード 実験用ボード 8.5*5.5 CM ニューブレッドボード [並行輸入品]
新品価格
¥870から
(2020/9/5 16:24時点) - ジャンパーワイヤー

ELEGOO 120pcs多色デュポンワイヤー、arduino用ワイヤ―ゲ―ジ28AWG オス-メス オス-オス メス ?メス ブレッドボードジャンパーワイヤー
新品価格
¥990から
(2020/9/5 16:28時点)これぐらいあれば演習には十分じゃないでしょうか。
ブレッドボードーブレッドボード
ブレッドボードーArduino
ブレッドボードーセンサー類
等オスメス全組み合わせが入ってます。 - サーボモータ

新品価格
¥440から
(2020/10/4 17:08時点) - 可変抵抗器

20PCS / LOT 3362P-103 3362P 10Kオームマルチターントリマーポテンショメーター高精度3362可変抵抗器3362-P103
新品価格
¥388から
(2020/10/4 17:12時点)
- Arduino互換機
- Aruduino本体 または互換機(安価)
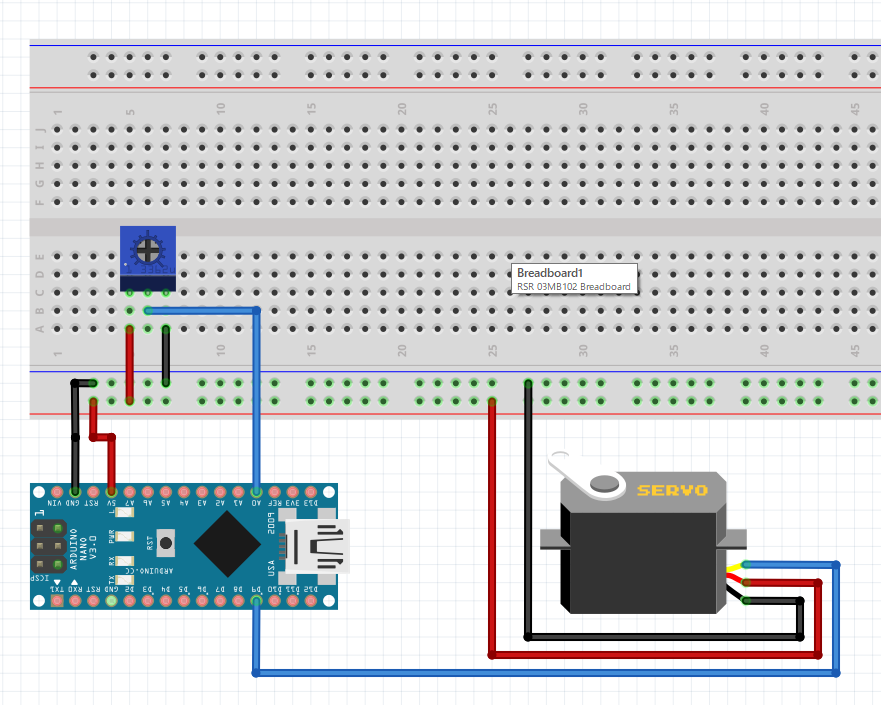
- 【配置図】
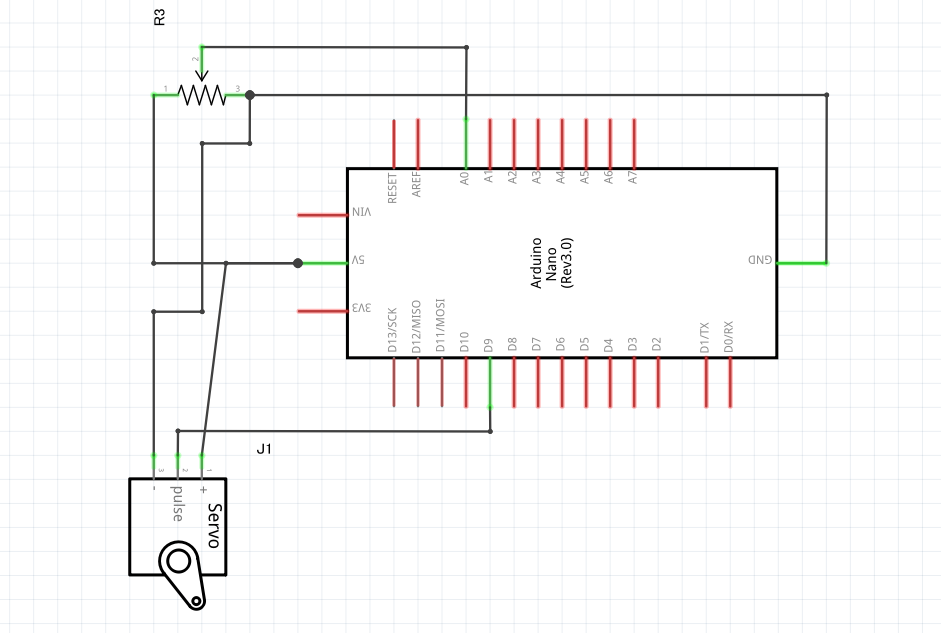
- 【回路図】
- 【プログラム】
#include <Servo.h>
Servo myServo;void setup() {
// put your setup code here, to run once:
myServo.attach(9);
Serial.begin(9600);}void loop() {
// put your main code here, to run repeatedly:
int sensorValue = analogRead(A0);
int angle = map(sensorValue, 0, 1023,0,180);
Serial.println(angle);
myServo.write(angle);
delay(10);
} - 【実際画像】
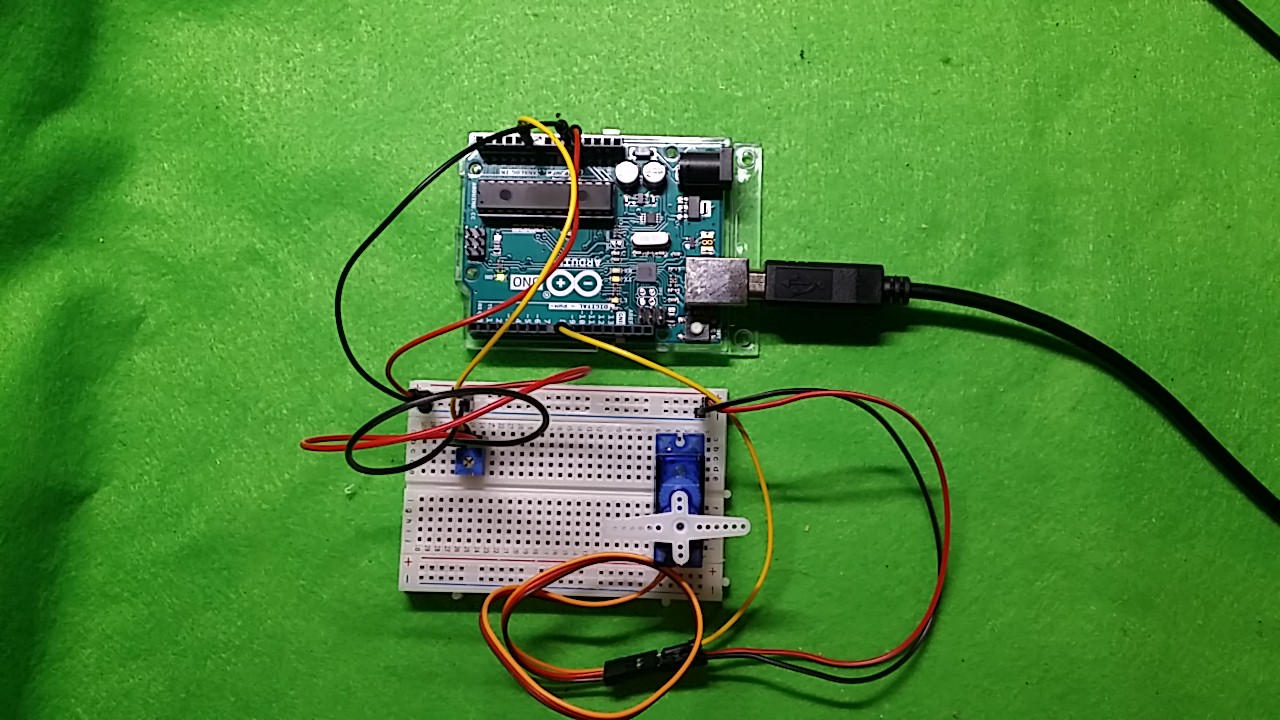
- 【実行結果】
可変抵抗器の数値を変えることで、サーボモーターが同じように角度を変えます。
- まとめ
今回デバックする為に
>Serial.println(angle);
命令をいれています。
これでモニタで数値を確認し、不具合のあるプログラム箇所に修正を入れていきます。
プログラムは面白い演習でした。
この仕組は今後色々使えそうです。