- タッチ部の見直し
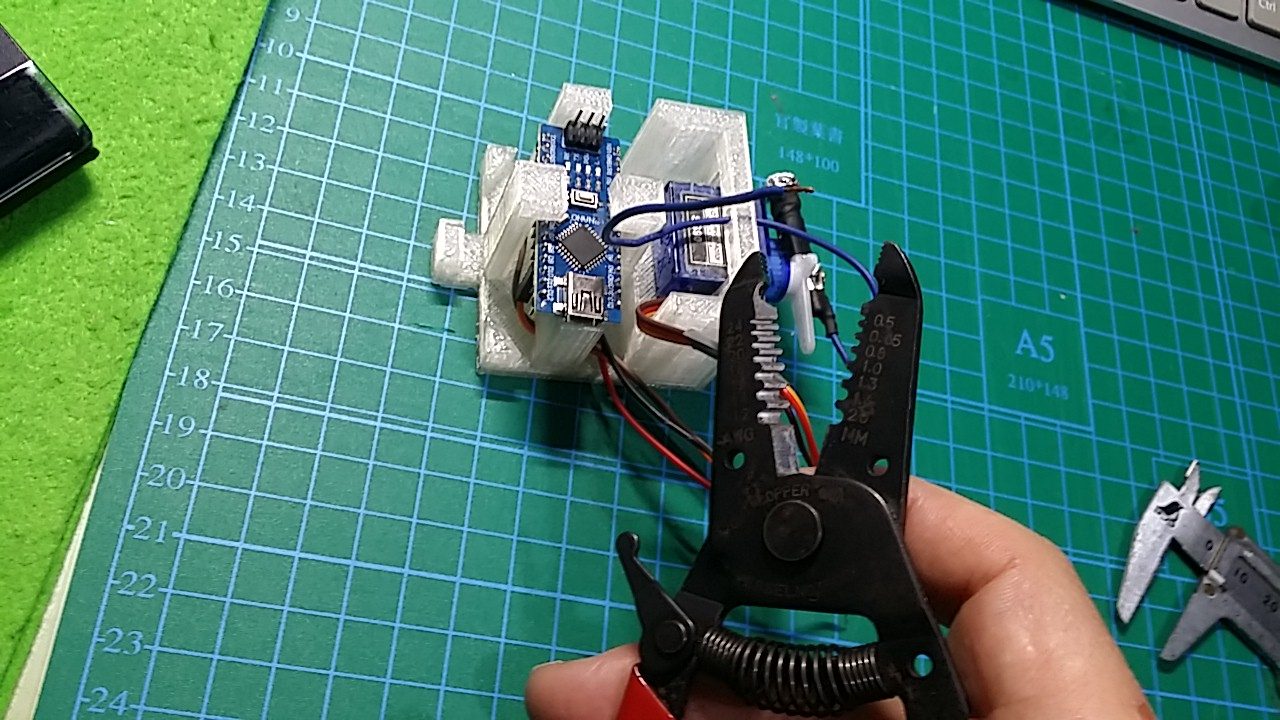
- 以前のタッチペンの使用をやめて、導電率が高く手に入れやすかったアルミニウム棒を芯に採用
おなじみカインズホームで入手。
これを30mm切出し、穴周辺を平坦にヤスリがけして1.5Φの穴をあける
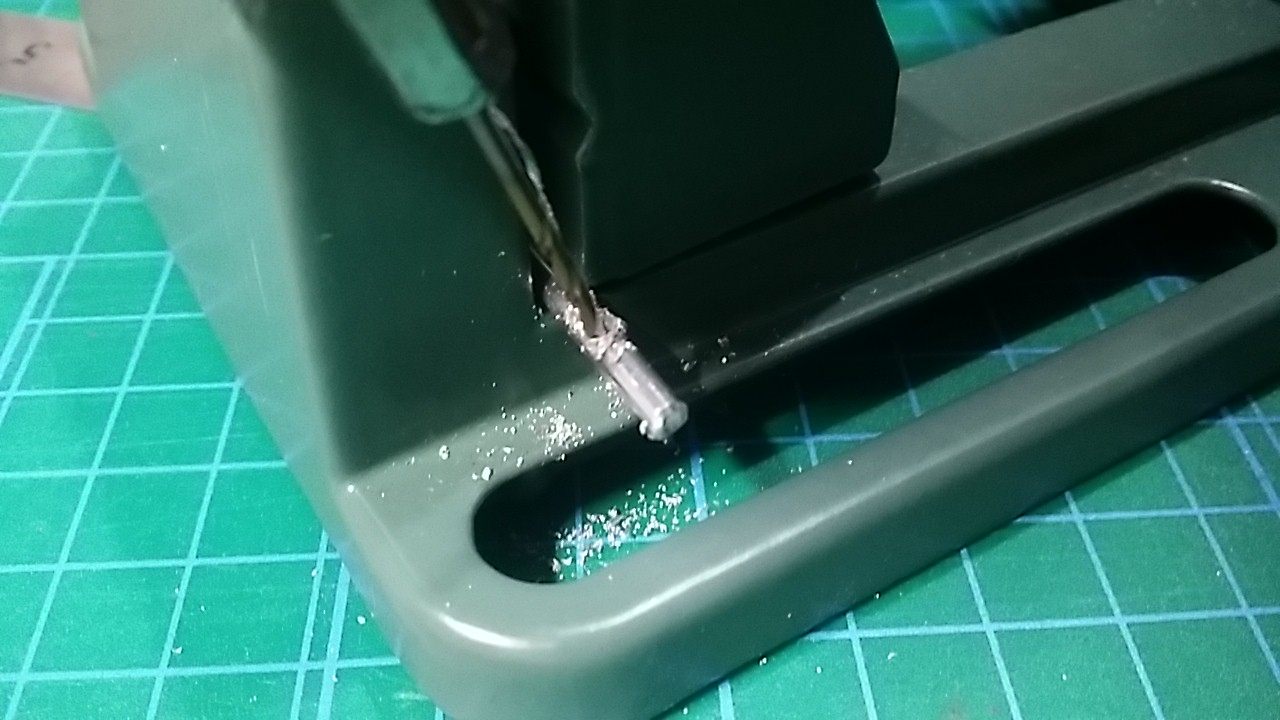
- 完成。結構しんどかった^^;

- タップ機SEはFEに比べて軽量化したかったので土台をアームで持つ形を考えた。これをブロックで検証。
アルミ棒のサイズもいい感じ。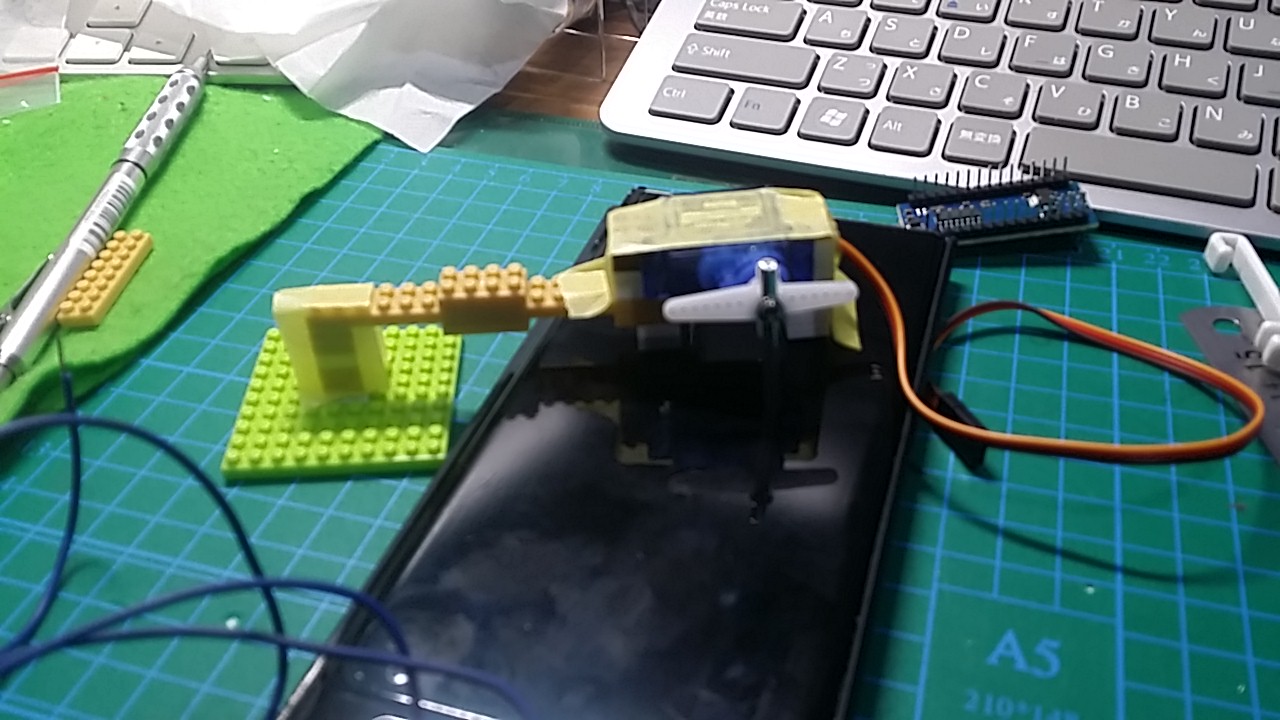
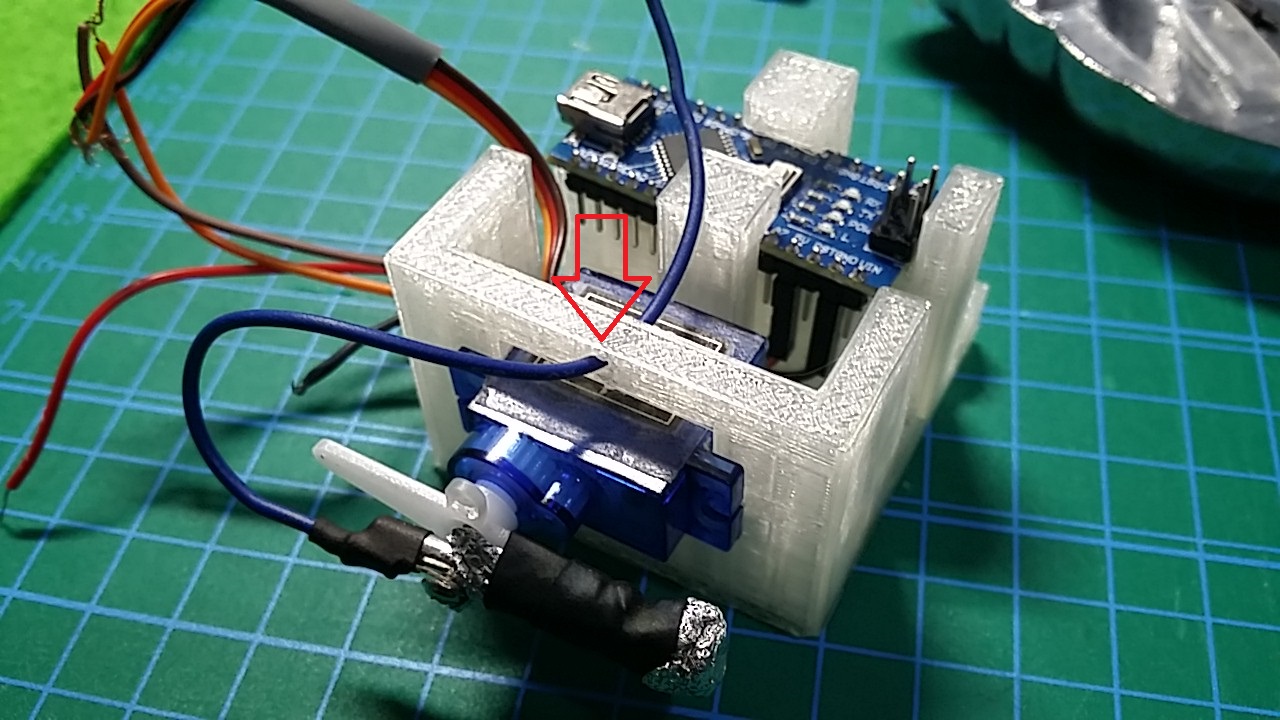
- サーボモータへの取付け。ここで1.25の丸端子を使い、アルミ棒の平坦部分と平行になるように設置
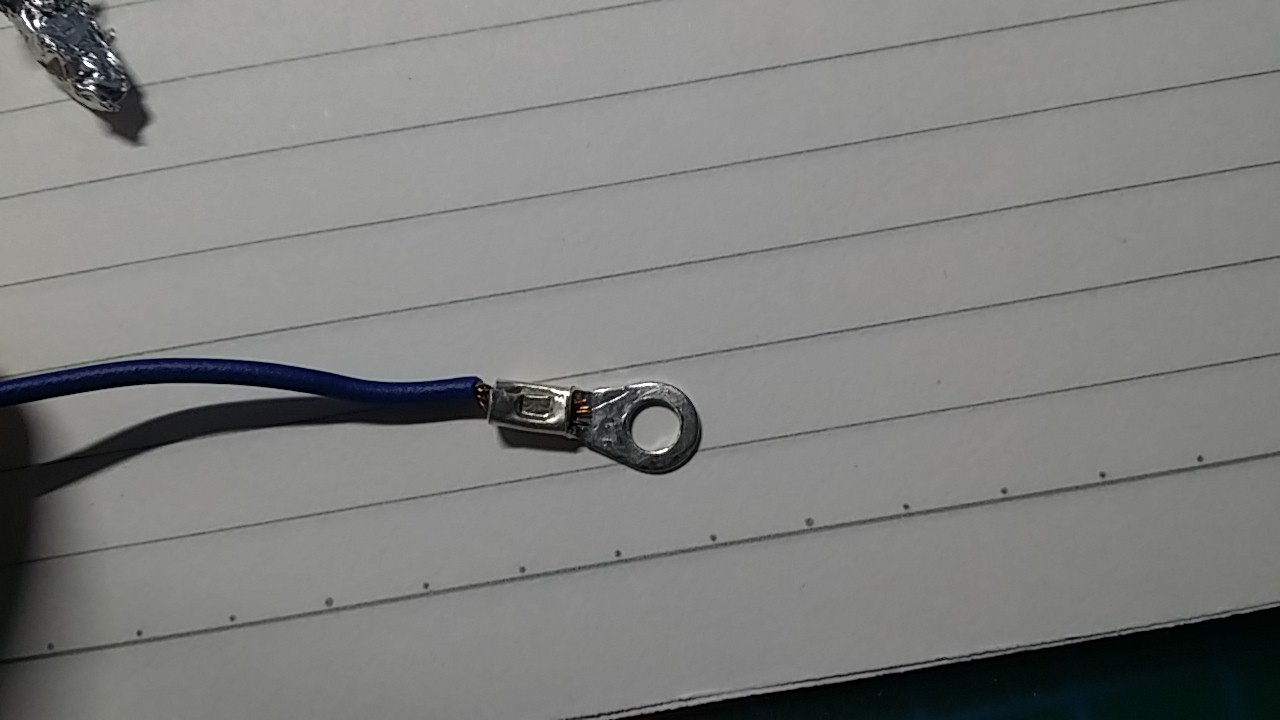
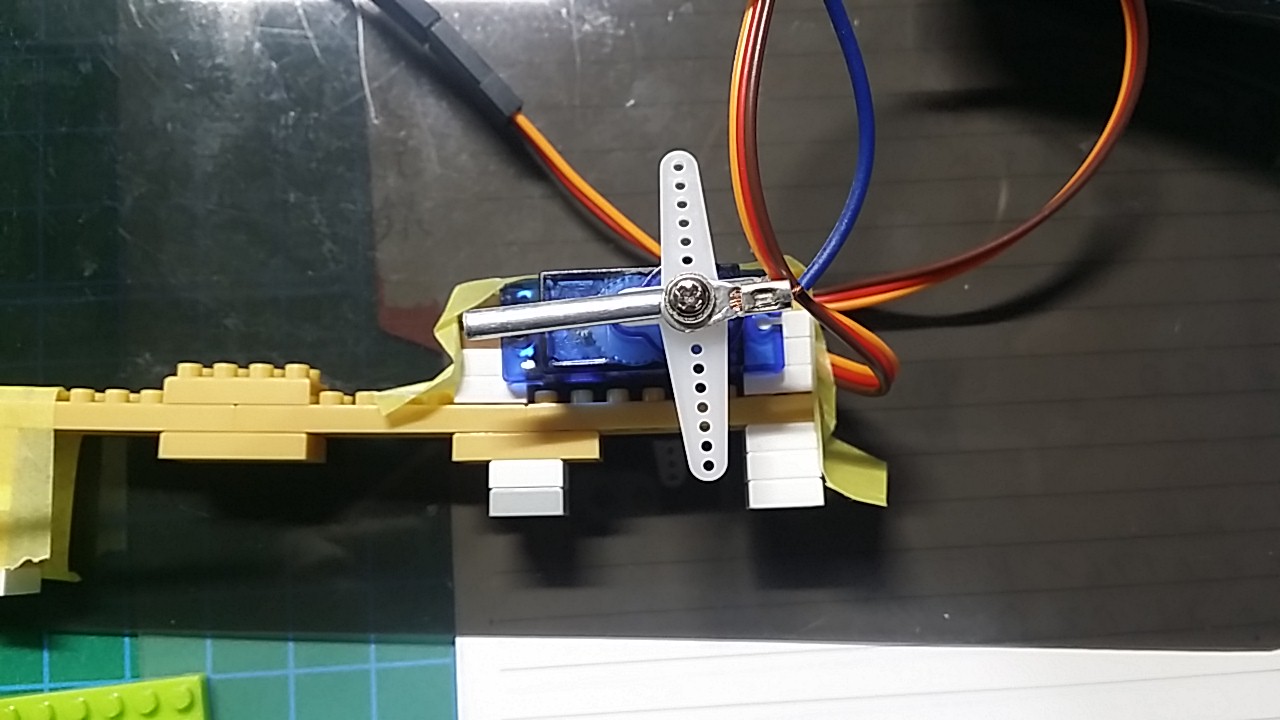
あとはアルミ棒をアルミ箔で巻き収縮チューブで固定 - 動作確認
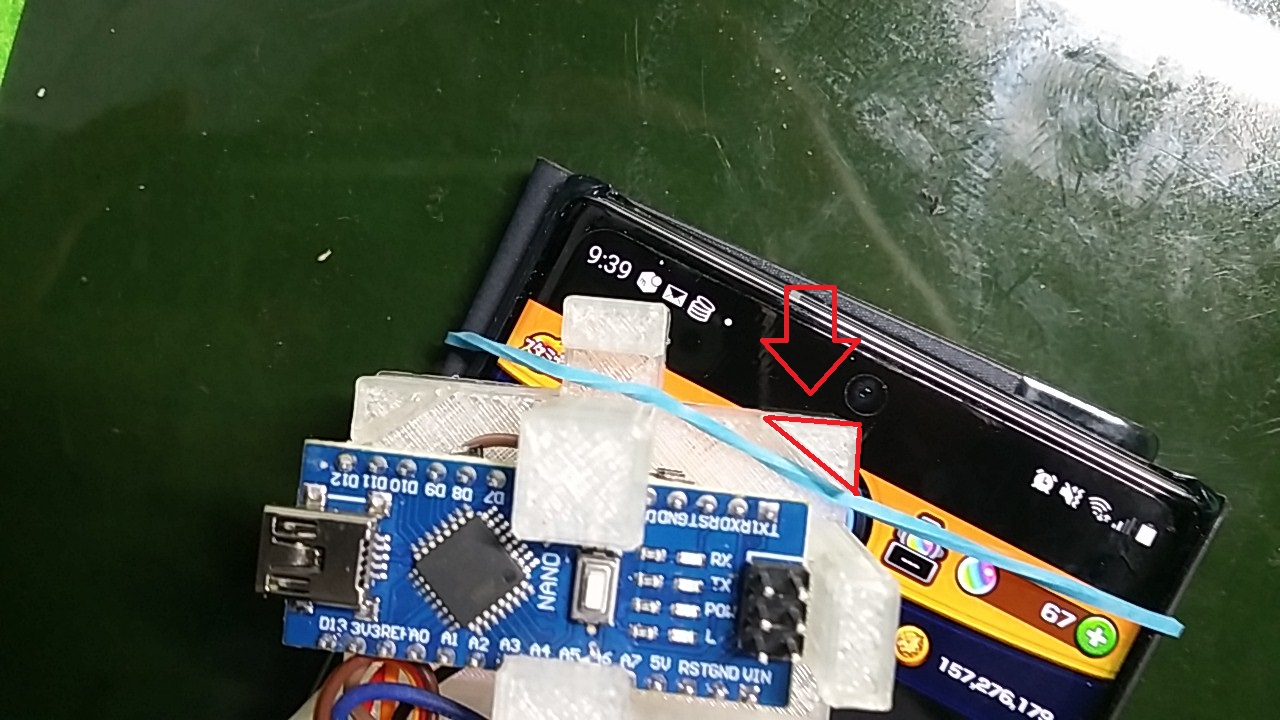
- ここで、どこにAru互換機を載せるか悩む。
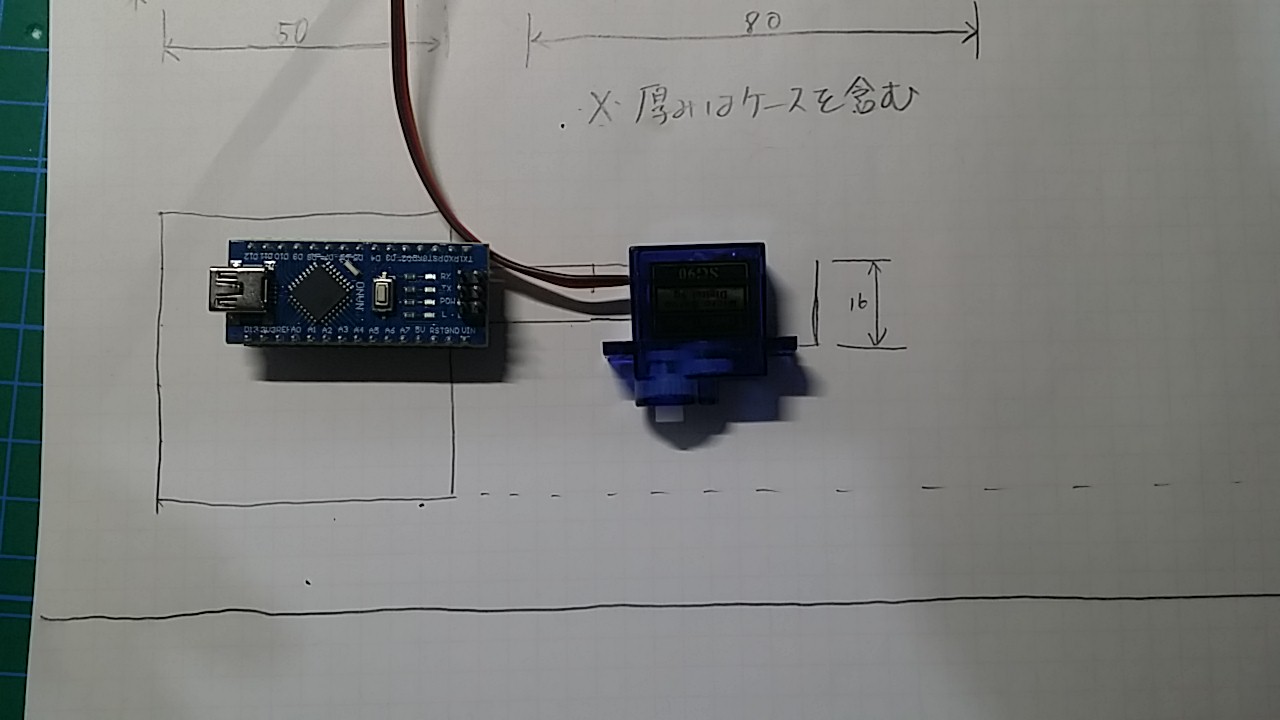
- 悩む・。。。
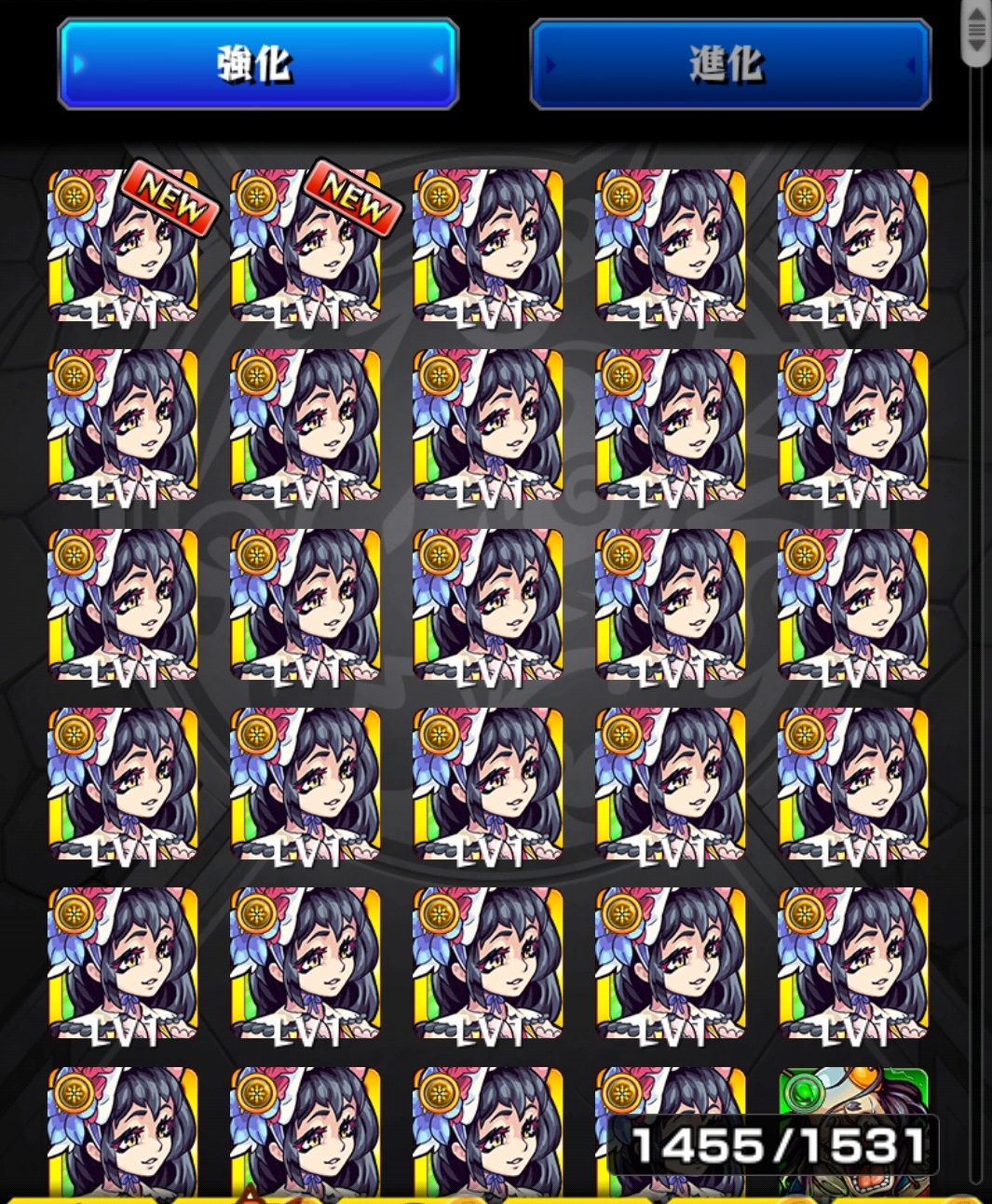
- テストはとってもいい感じ。
1時間でわんさか確保♪
見てなくて、極はほぼいけますが、究極が可能な場合も有り。
- 一晩明けて、土台いらなくね?と考え排除。
再びブロックで検証。ここからタップ機TEとなる。
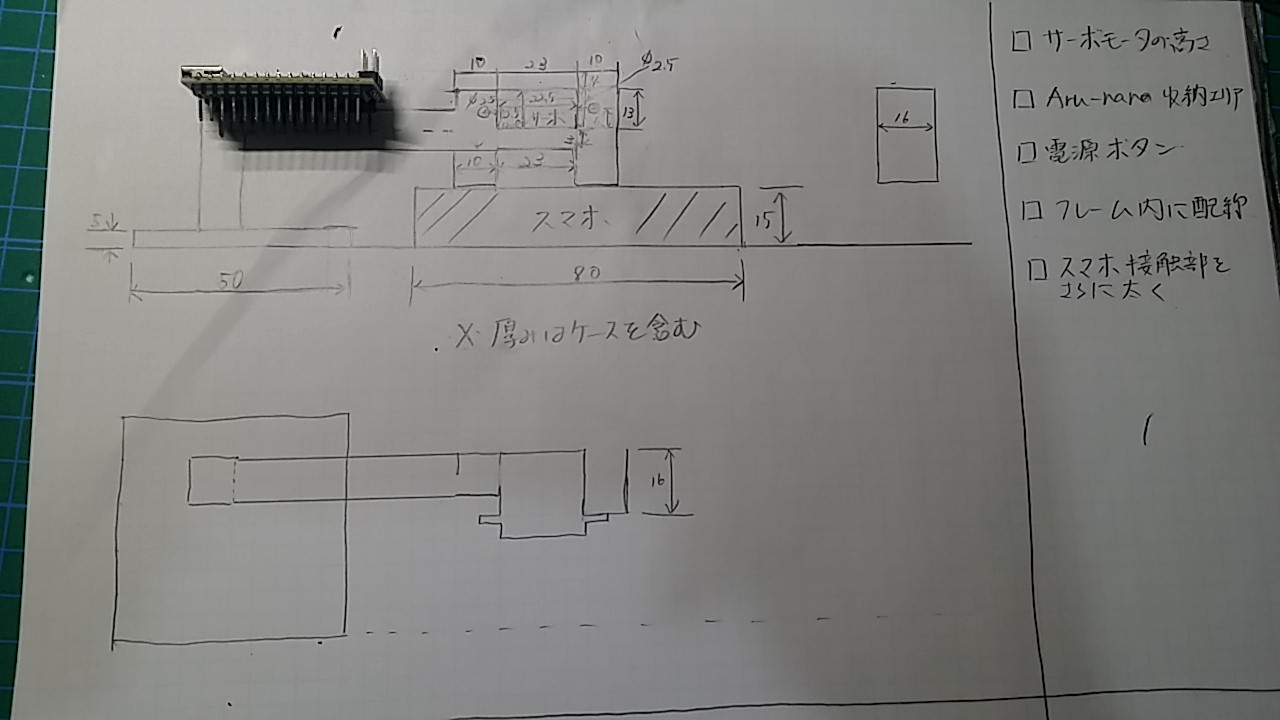
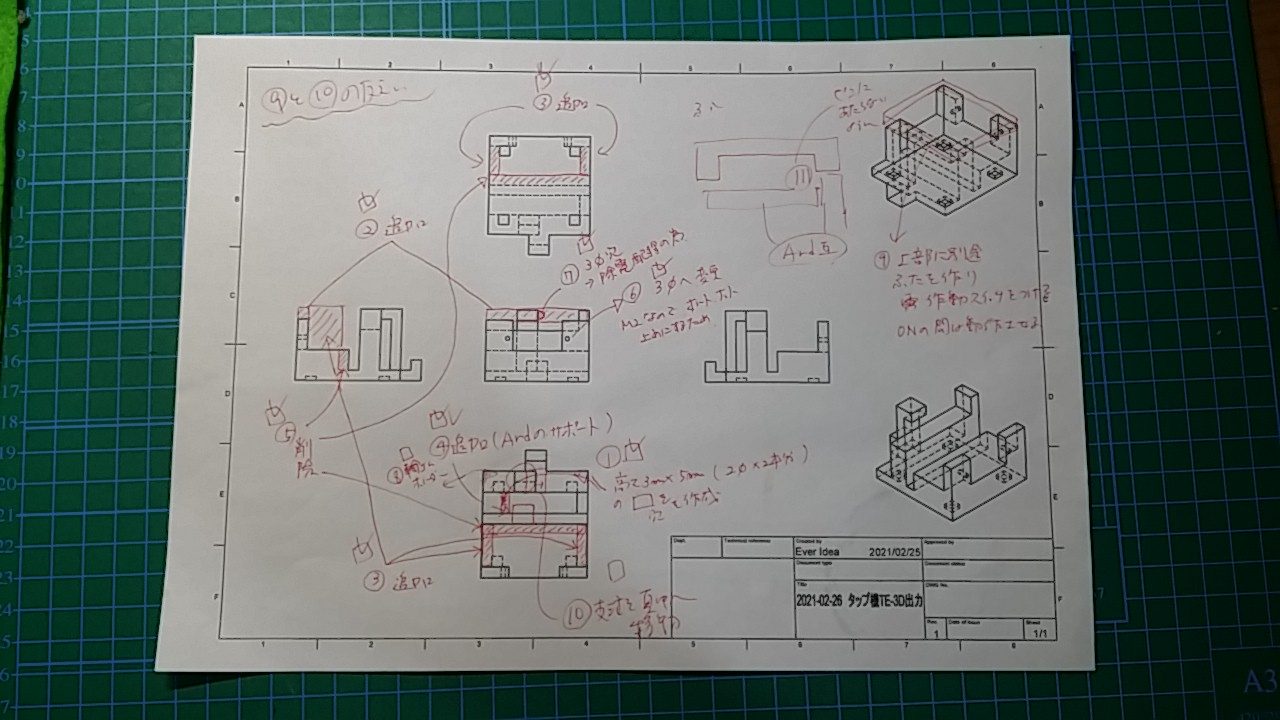
- タップ機TEの企画を練る
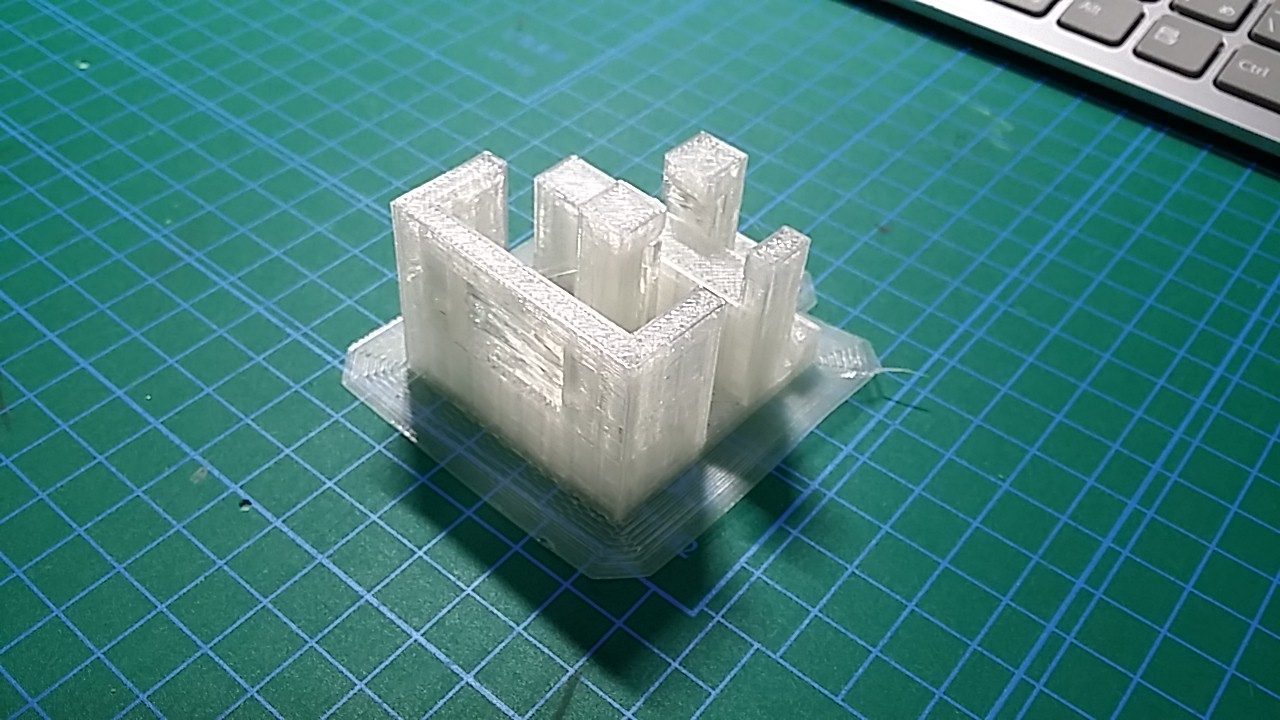
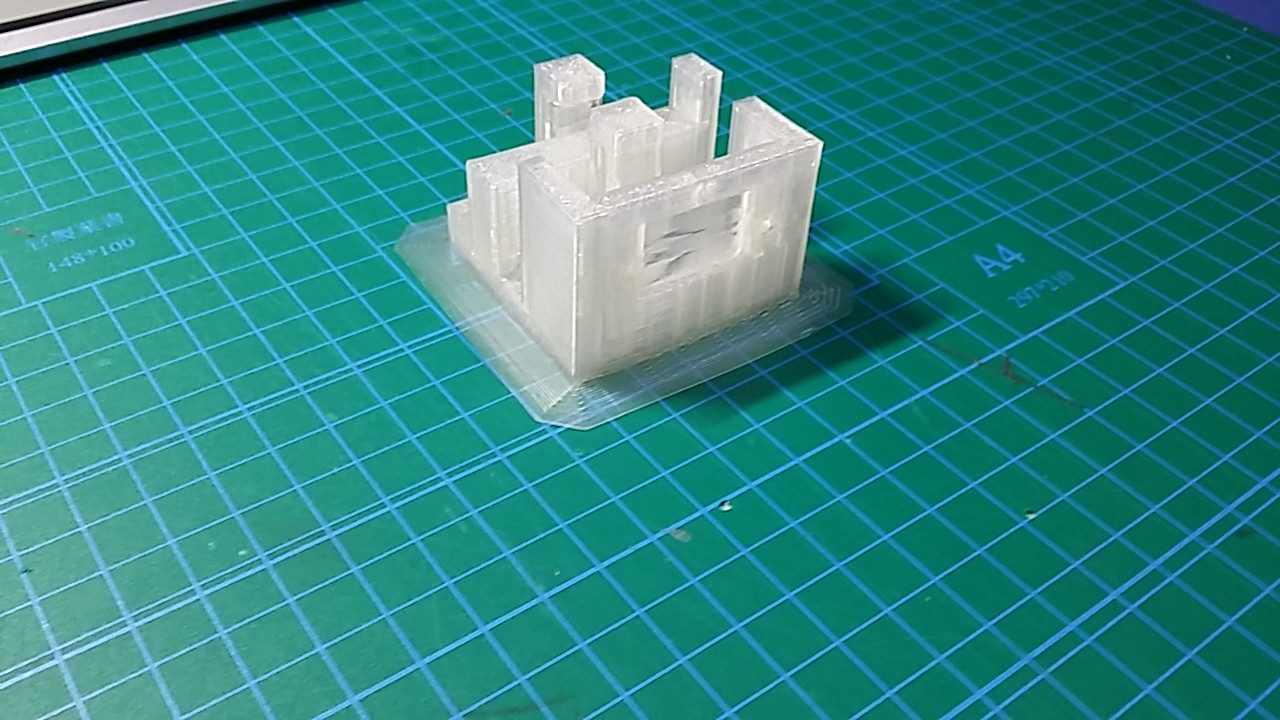
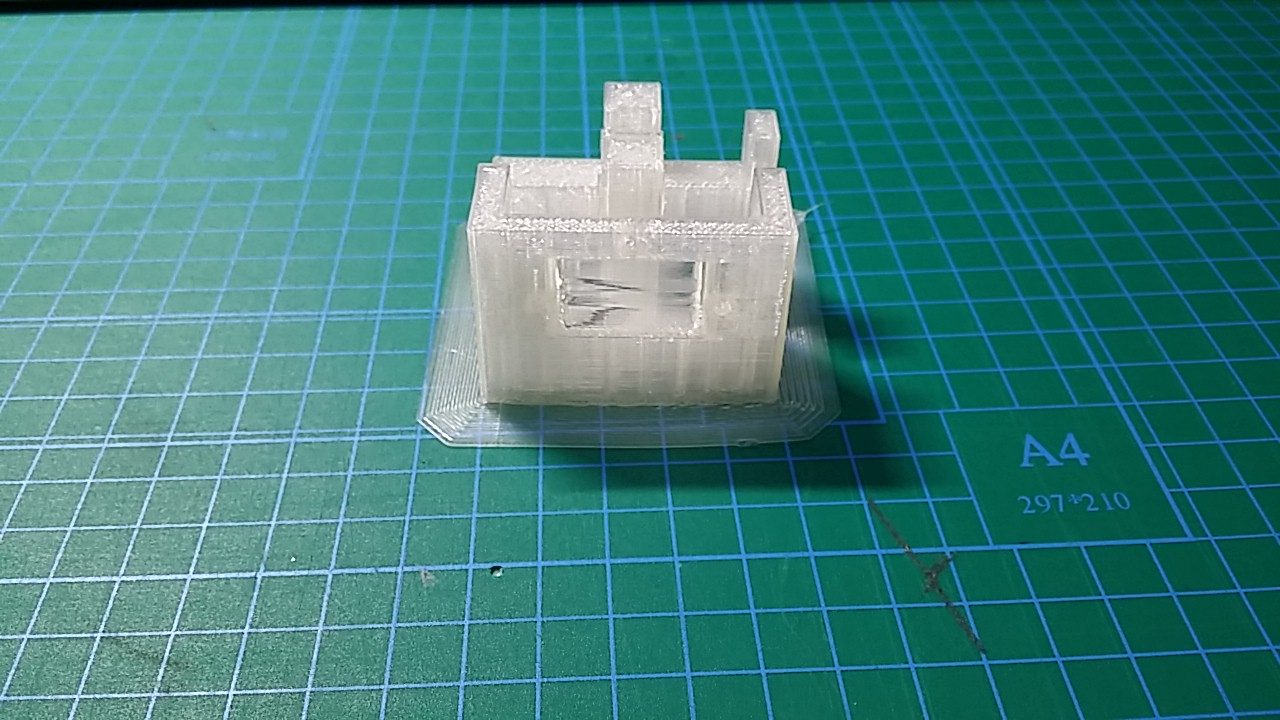
- 3Dプリント出力

- 部品を載せてテスト
- TEで出た改善、不具合点をまとめる
- 修正
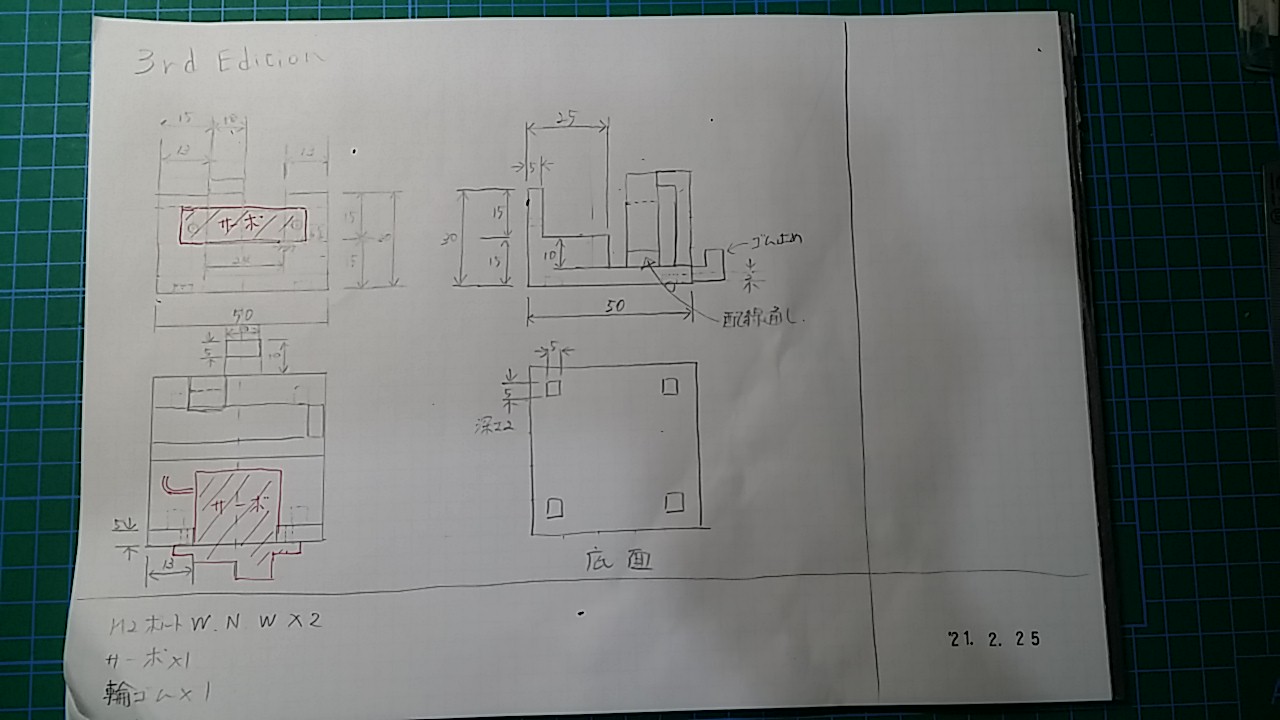
- 図面
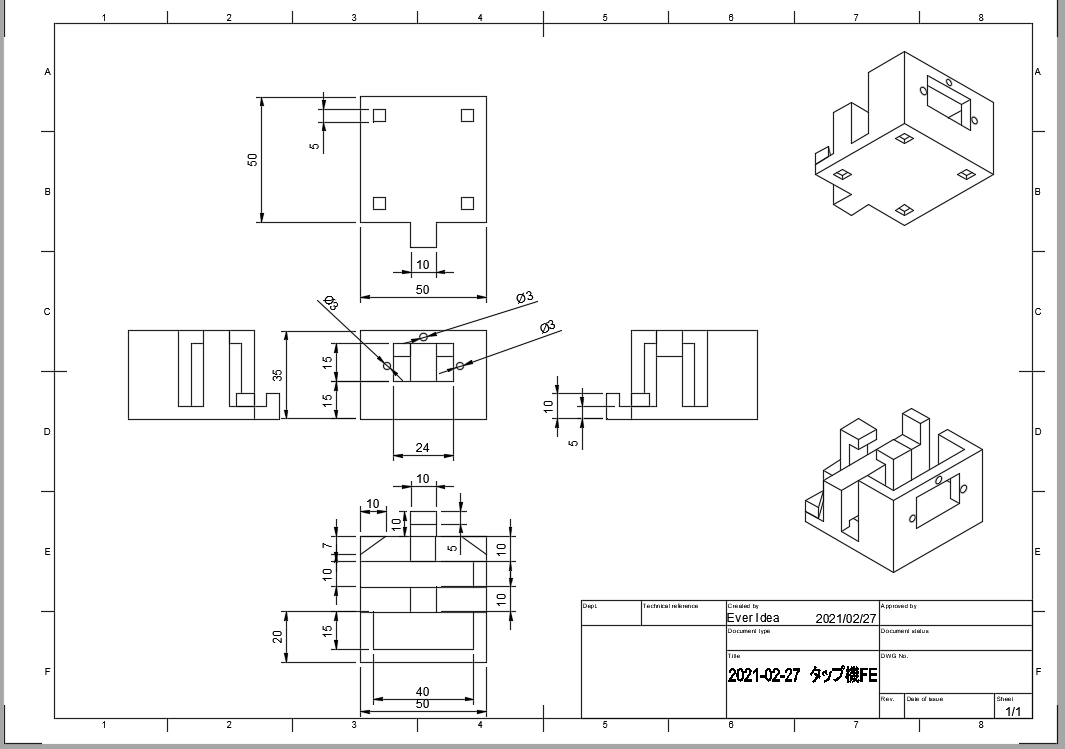
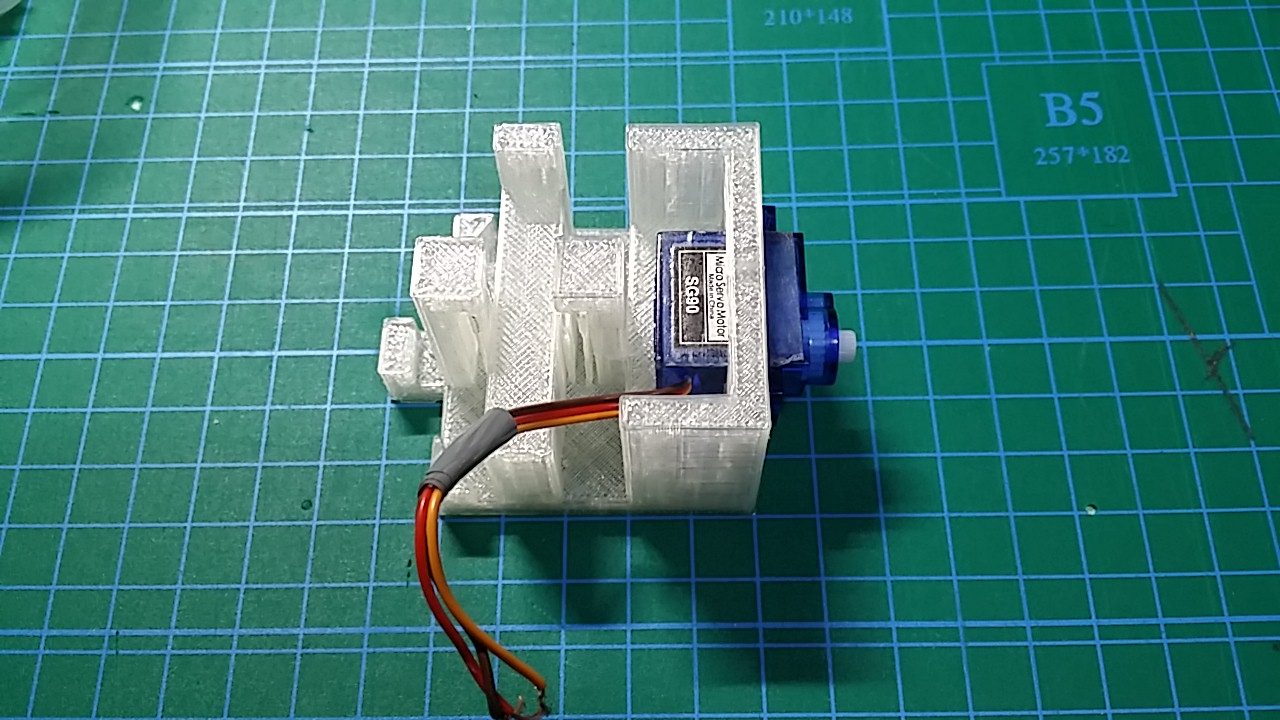
- FE完成

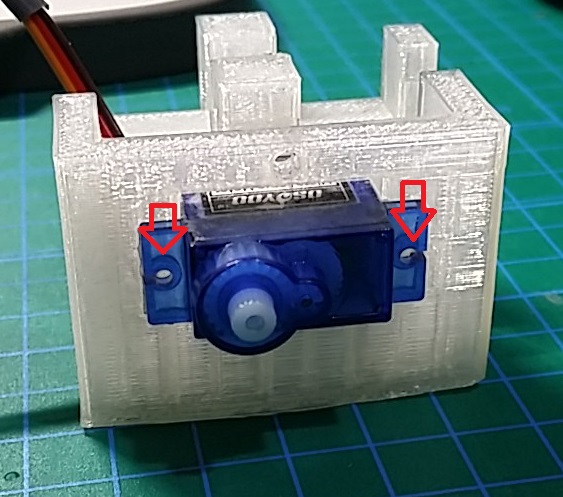
- サーボの組み込み
- M2登るとが無いのと、穴位置が合わない
反省:次回は長穴にする。
- Aru互換機の片側からの電線を土台に通す
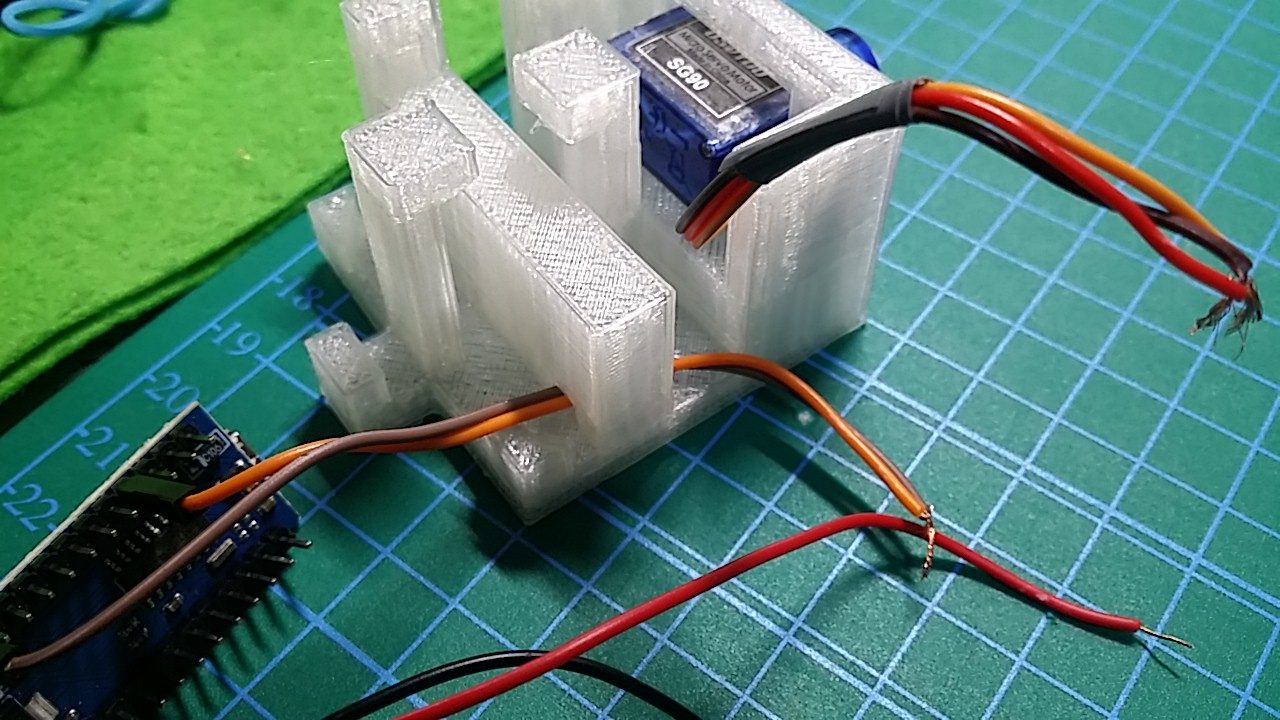
- Aru互換機を載せる
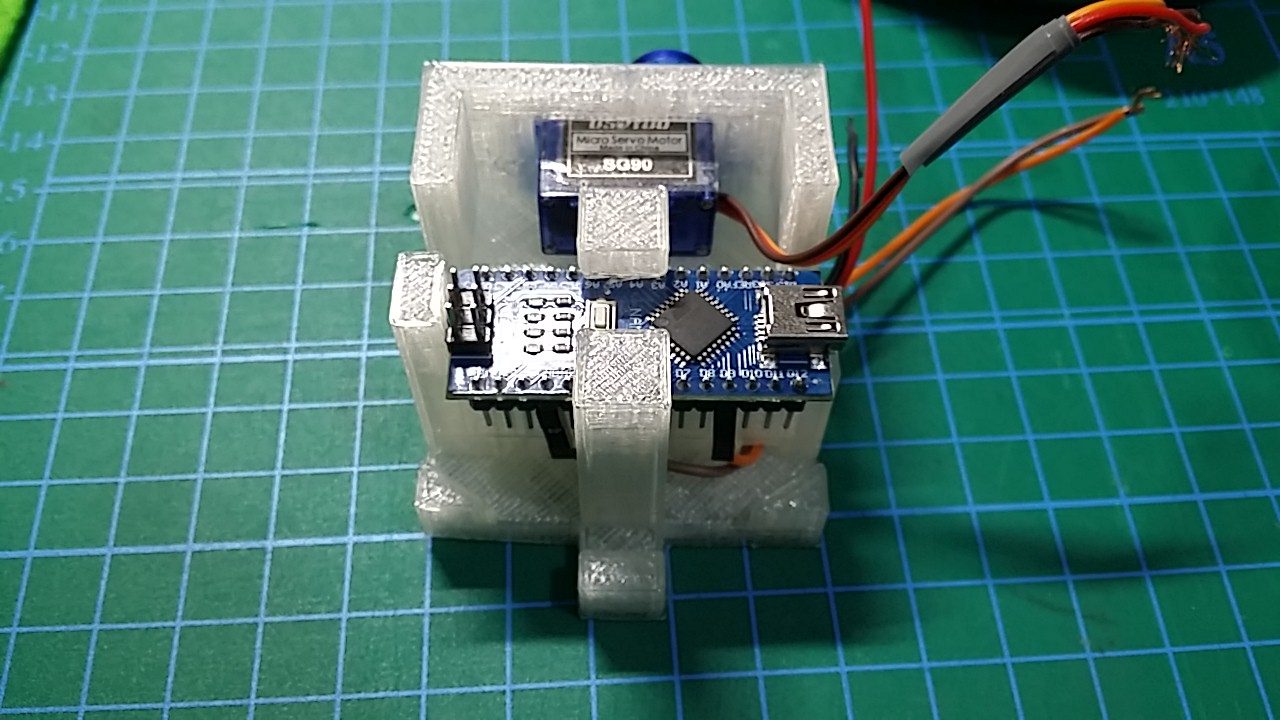
- タッチ部のアース線をGNDに繋ぐ
- 結線
- ハンダが面倒なので収縮チューブで接続

- 電線が土台に収まった。
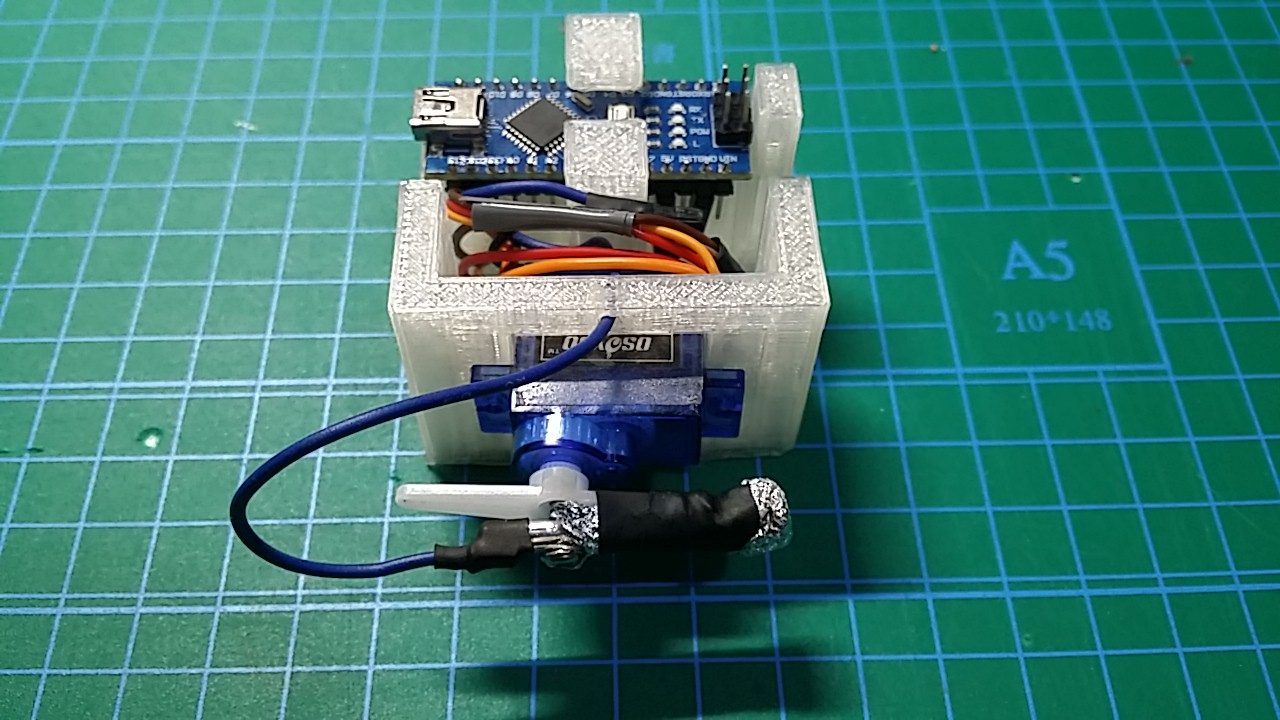
- 今回ゴムを取付ける際のフックを作成。
これで斜めに配置しやすくなった
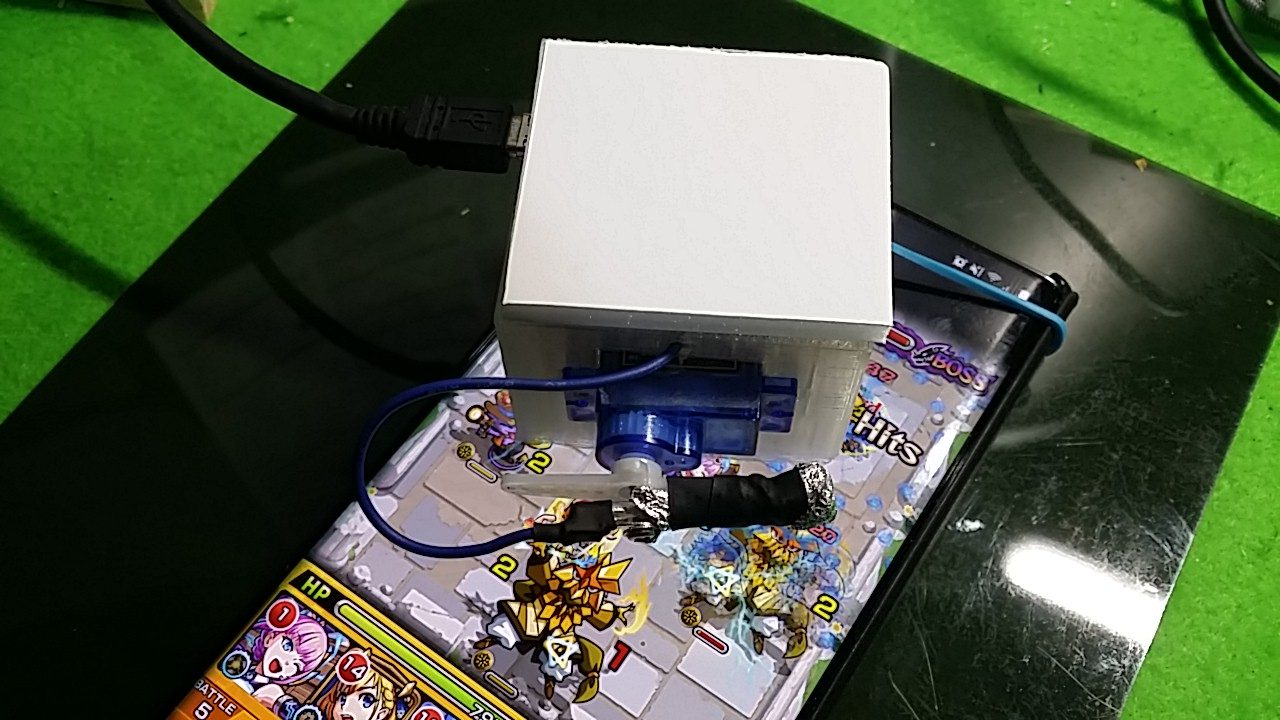
- テスト
かなりいい感じ
- 完成
コスト削減の為フタは3D出力ではなく100均のボードを使用。
ちょっとかっこ悪いけどまあいいや^^;
- 以前のタッチペンの使用をやめて、導電率が高く手に入れやすかったアルミニウム棒を芯に採用