今日はモータの回転を変化させ動かす演習です。
最初ゆっくり回転させ、その後徐々に早くなっていきます。
材料は下記の通り ※前回同様です
モーター
 |
|
新品価格 |
FET
 |
|
新品価格 |
![]() ダイオード
ダイオード
 |
|
新品価格 |
![]() コンデンサ
コンデンサ
 |
|
村田製作所(MURATA) 汎用 積層セラミックコンデンサ 絶縁型 ラジアルリード 50V 0.1μF RPシリーズ RPEF11H104Z2M1A01A (10個セット) 新品価格 |
抵抗(1KΩと20KΩ各1本)![]()
 |
|
OSOYOO(オソヨー)金属皮膜抵抗器 抵抗セット 10Ω~1MΩ 30種類 各20本入り 合計600本 (600本セット) 新品価格 |
その他単3電池、配線が必要です。
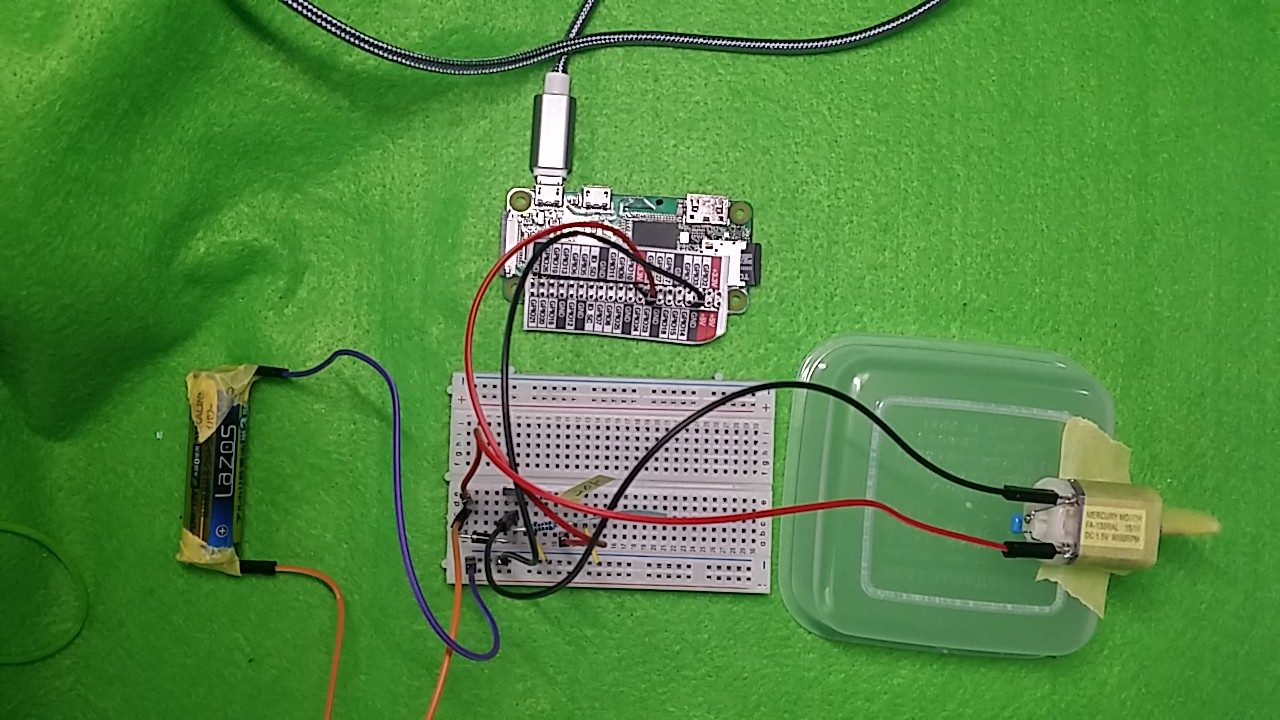
※電池ボックスは使わず電池を直結しました。(写真参照)![]()
![]()
![]() テキストはいつも通り下記を使用します。
テキストはいつも通り下記を使用します。
 |
|
電子部品ごとの制御を学べる! Raspberry Pi 電子工作実践講座 新品価格 |
![]()
今日の演習はP146まで
※動作環境は前回と同様です
-
- ラズベリーパイ本体 RaspberryPi Zero使用 1台
- モーター FA-130RA 1個
- FET 2SK4017 1個
- ダイオード 1N4007 1本
- 抵抗 1KΩ 1個
- 抵抗 20KΩ 1個
- コンデンサ 0.1μF 1本
- 配線 適量
- 電池(単3) 2本
- 詳細
- 配置図
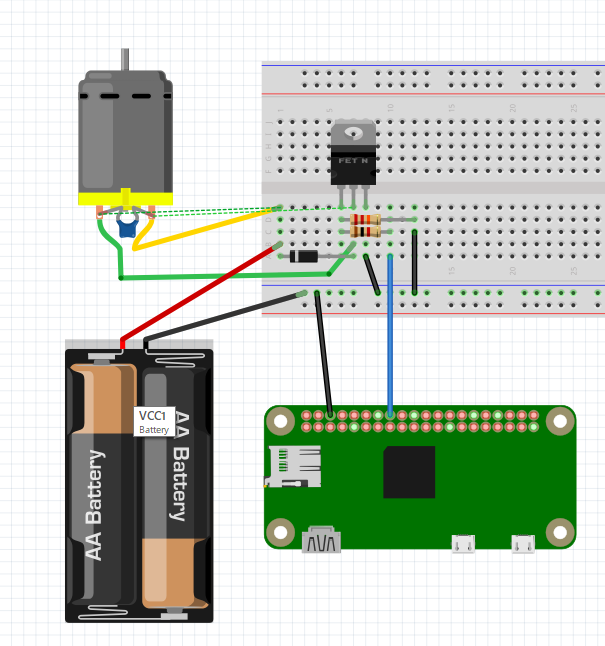
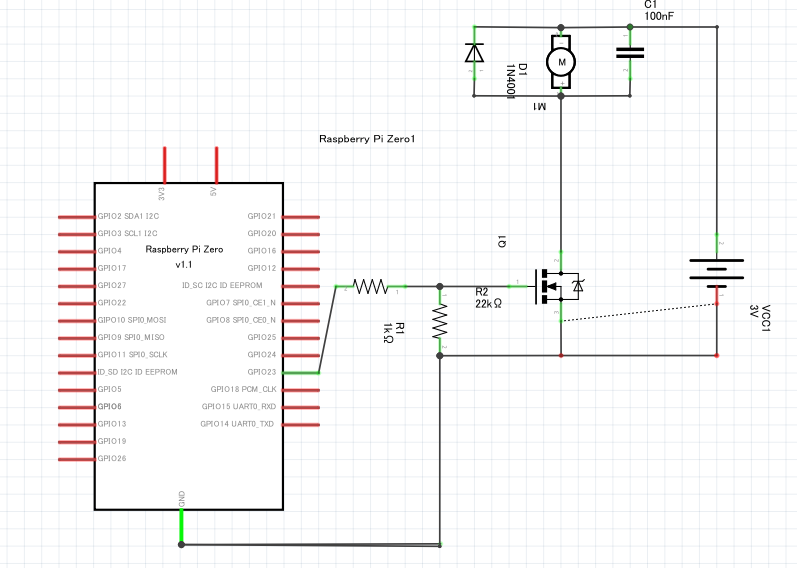
- 回路図
- 配置図
- プログラムは次の通り
import wiringpi as piimport timemotor_pin = 23pi.wiringPiSetupGpio()pi.pinMode(motor_pin, pi.OUTPUT)pi.softPwmCreate(motor_pin, 0, 100)pi.softPwmWrite(motor_pin,0)while True:speed = 0while(speed <= 100):pi.softPwmWrite(motor_pin,speed)time.sleep(0.3)speed = speed + 1pi.softPwmWrite(motor_pin, 0)time.sleep(2)
-
実物写真
- 実行結果
- 総括
今回前回と同じ環境だったにも関わらず動かないという不具合がありました。
結果は接触不良でしたが、テスターを使い一つ一つ原因を追求していきました。
ブレットボードは接触不良多いですね・・・
こうした経験が今後に役立てばと思いました。