今日から新しい領域に入ります。
いつも通り新しい事を学ぶにはまず「やってみるべし」で行きたいと思います。
※今回の学習は学習用のロボットデータを取得する必要性があります。テキストのP166を参考にしてダウンロードしておいて下さい。
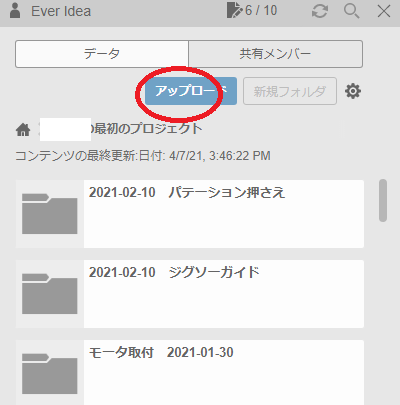
- P166を参考にしてデータをアップロードします。
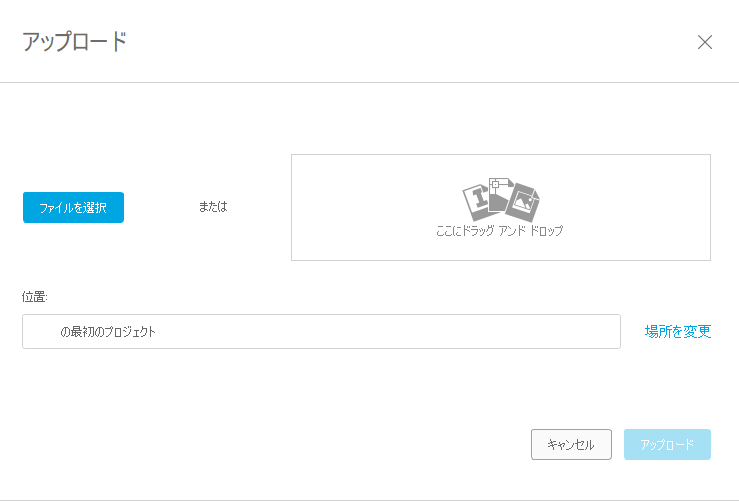
-
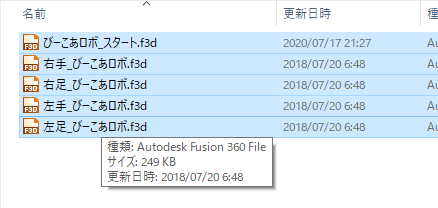
-

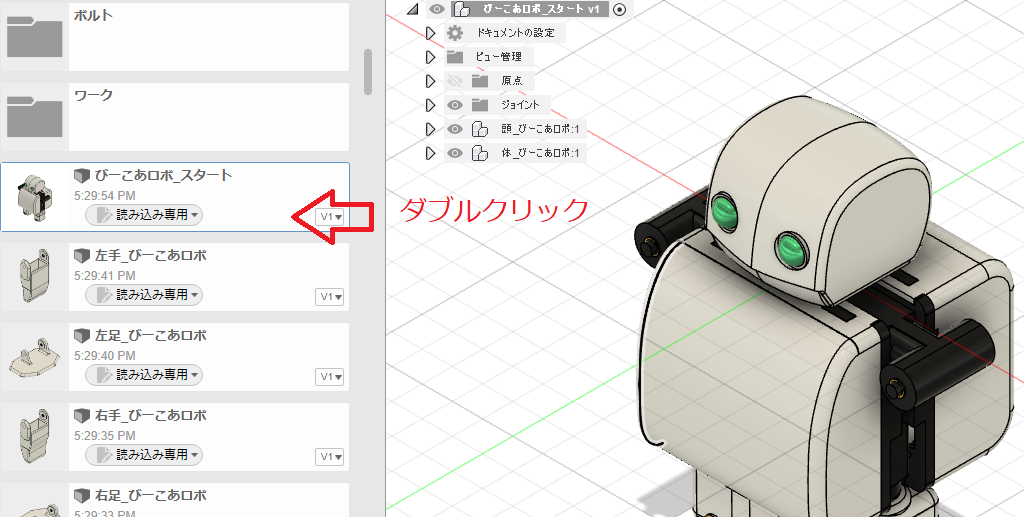
- データが取り込まれました。
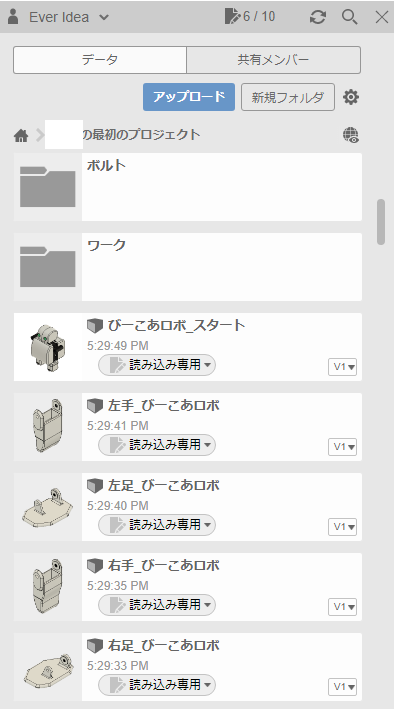
- アップロードしたデータを読み込み
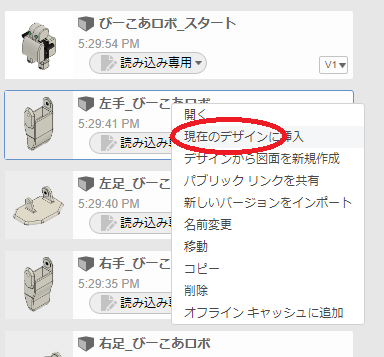
- さらに左手をデザインに挿入
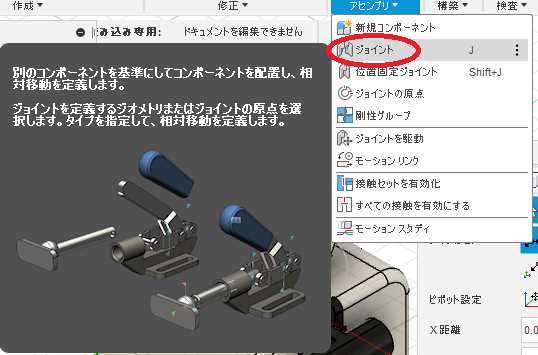
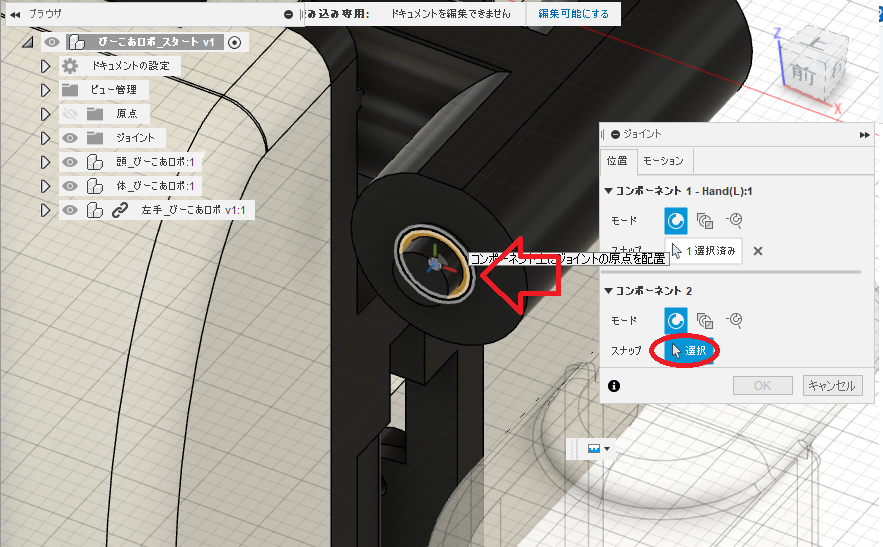
- アセンブリからジョイントを選択
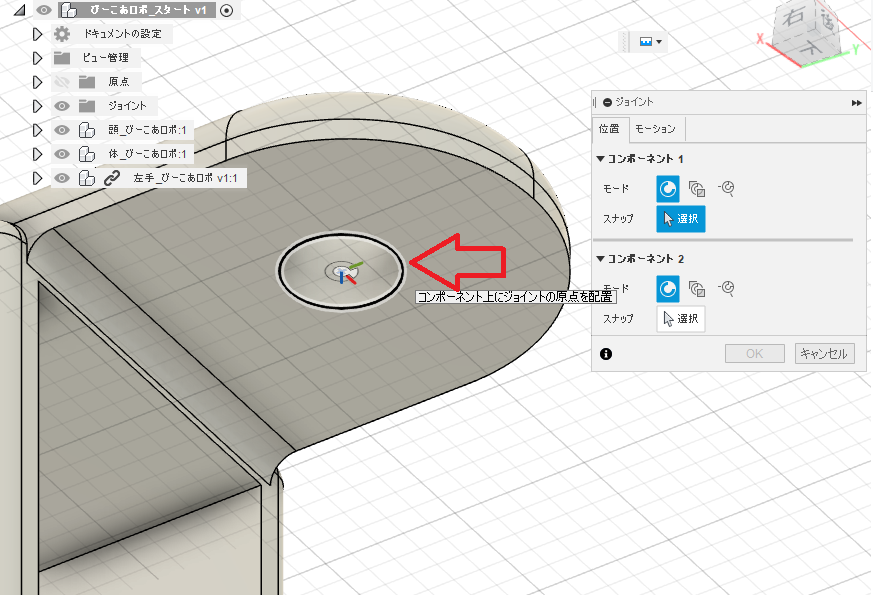
- つなぎ目にジョイント位置をあわせます。
まずはコンポーネント1で左手の接合部を選択
- 続いてコンポーネント2で本体の接合部を選択します。
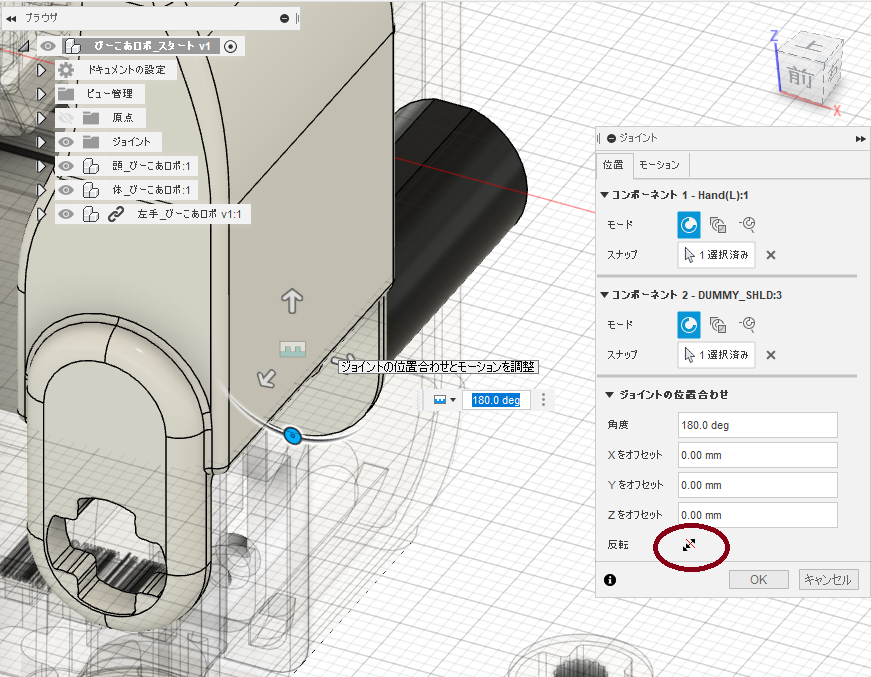
- 接合位置が反対になってしまったので、「反転」をクリックしてひっくりかえします。
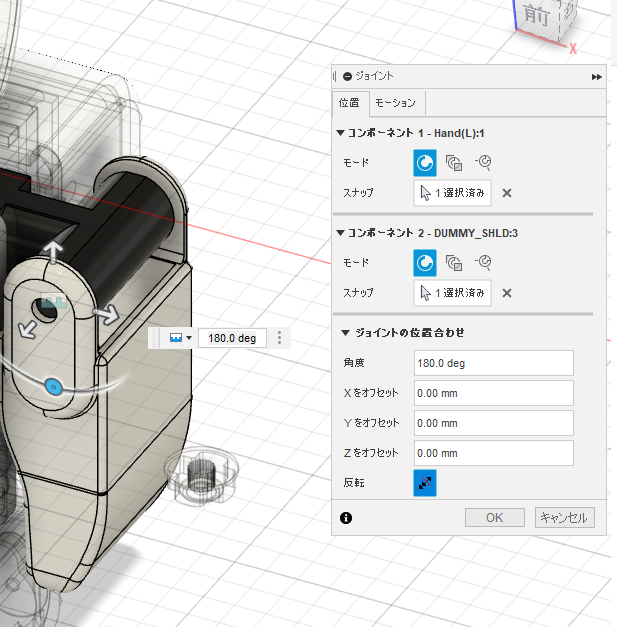
- 予定の位置に接続されました。
- 続いてモーションタブをクリックして、タイプから「回転」を選択
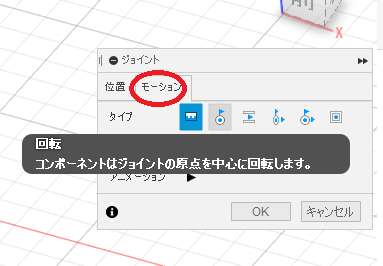
- 回転方向は「Z軸」を選びました。
※分からなかったらとりあえずどこかの軸を選んで回転させてみれば分かります。 - ブラウザのジョイントから設置した左手で右クリックすると色々メニューが現れます。
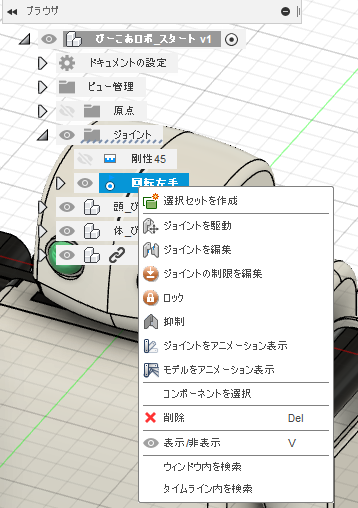
- ジョイント
- 腕をつかんでドラックすると腕を自由に動かせます
【感想】
FUSIONすごい・・・^^;
部品がちゃんと結合してきちんと動くかどうかも確認できそうです。
これを2D CADでやろうとすると私の頭では無理そうです。
間違いも減らせそうですし、こりゃ3DCAD使われますわな・・・
ほんとすごい♪【使用させて頂いているテキスト】
Fusion360マスターズガイド
こちらの本のおかげで色々3Dで描けるようになってきました。
こちらの解説書は図が豊富で画面の説明が丁寧にされています。
文書を読むのが苦手な私にとってとてもわかり易い本でおすすめです。
初心者~中級者ぐらいのボリュームがあるので2冊分ぐらいの値打ちはあると思います。
 |
Fusion 360 マスターズガイド ベーシック編 改訂第2版 [ 小原 照記 ] 価格:3,278円 |
![]()
何事も飽き性な私がここまでこれたのもこちらの本のおかげです。
![]()